
SMTIP as ill-posed inverse problem
The results of the kinematic stage of the inverse problem solution are four parameters: three coordinates of the events and its beginning time. Estimation of the velocity is carried out too. It is supposed that initial value of the velocity is known.
Determination of the beginning time of events is based on automatic cross-correlation data.
The results of the dynamic stage of the inverse problem solution are six functions

The method of minimization. Regularized solution
Control solution. Creating the optimal algorithm for the inverse problem
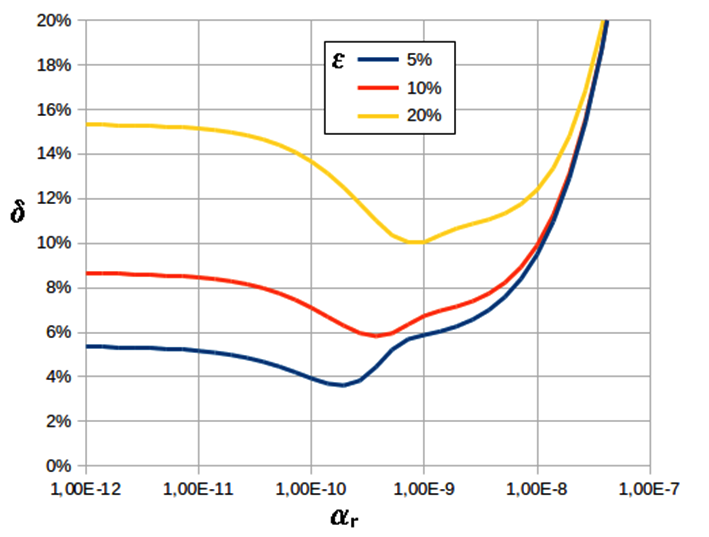
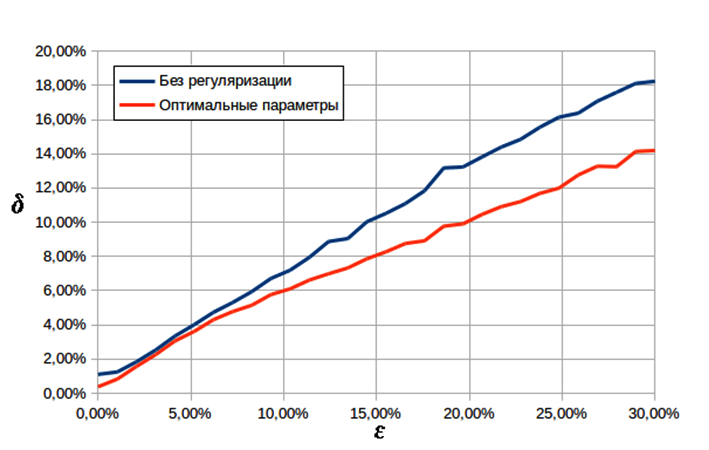
Control of solution accuracy during data processing
Key of control is to follow the roadmap of the optimal inverse problem solutions, which has four steps:
- Mathematical simulation of seismic wave propagation for the fixed event and for the specific sensor array;
- The perturbation of simulated data by noise with pre-fixed variance (usually 25-30%);
- Search the optimal algorithm of inverse problem for preset noise, event parameters and sensor array in the fixed stability interval (so called correctness of domain for the inverse operator - ill-posed problems theory);
- Apply the optimal algorithm to real microseismic data