
Accuracy control of determination coordinates using perforation shots
Recording equipment
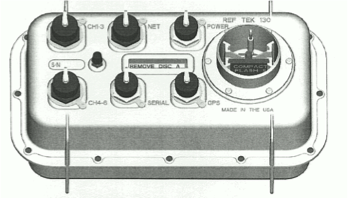

Autonomous node «RefTek 130.1» (6 registrars) SGD 48/96

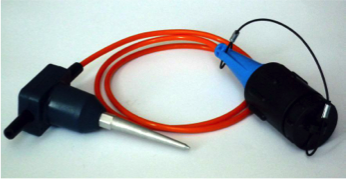
Sensor GS11D Sensor GS20DX
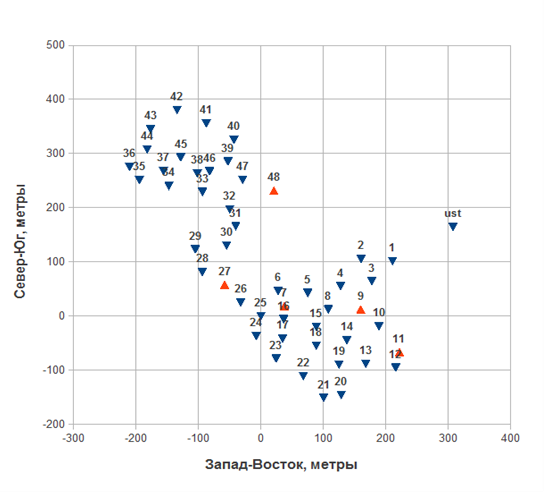
Layout of registrars (blue points), well (red line)
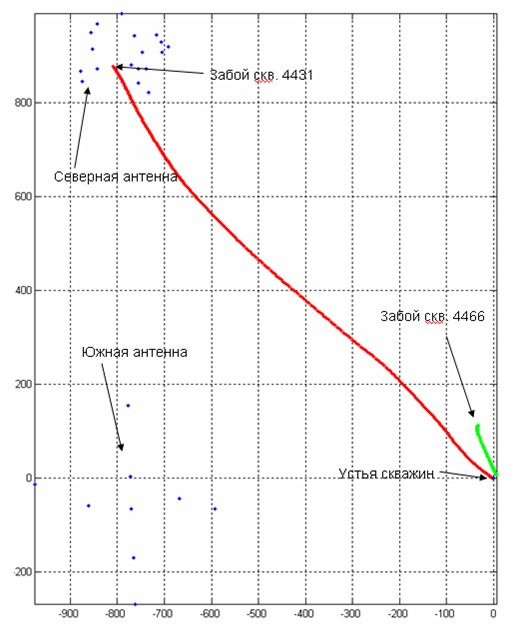
Malobalikskoe oilfield. Well cluster #604, well #4431, The depth is 2760 meters, RefTek, 2006, Ugra
Perforation. Well #4431, West Siberia
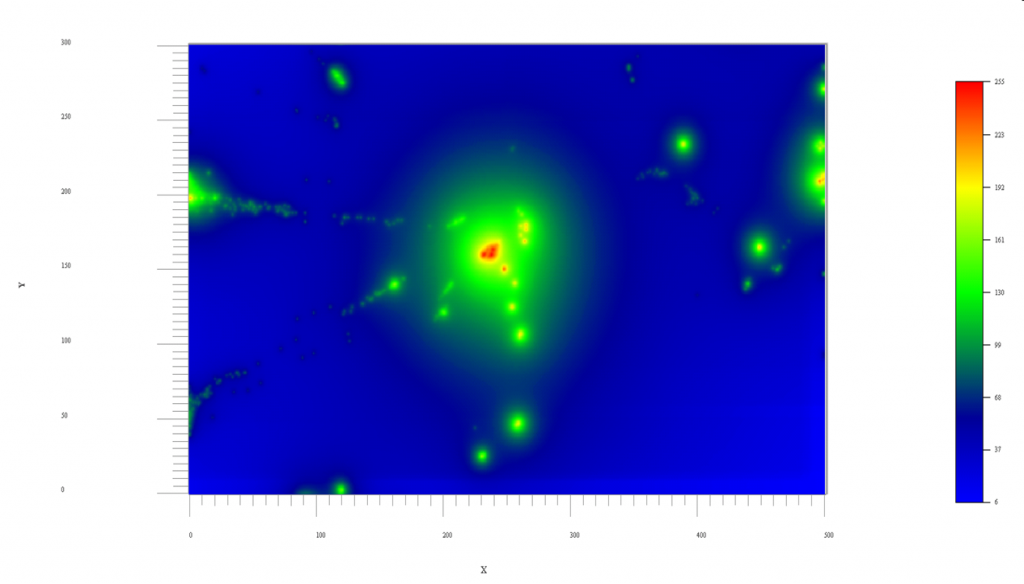
Image of seismic emission for perforation in horizontal plane. Аccuracy is 10 meters or better. Malobalikskoe oilfield. Well cluster #604, well#4431. The depth is 2760 meters. 2006, Ugra
Perforation. Well #3591, Kazakhstan
Oilfield Uzen, well #3591, depth 1253-1258 m, SGD-48, Kazakhstan, 2012
Geometry of the surface receiver array, well #3591
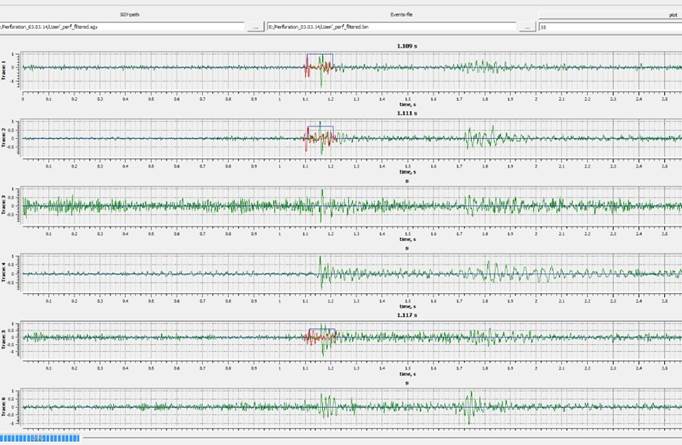
Perforation after filtering. Automated picking the arrivals based on cross-correlation
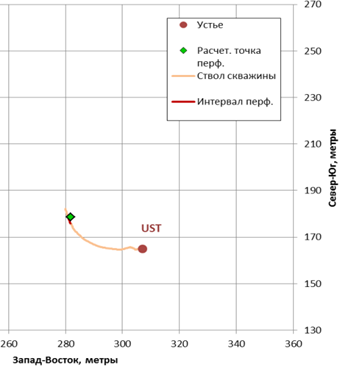
Perforation. Result of processing
Main difference the MicroSeismicPRM kinematic inversion from another surface microseismic monitoring approaches consists of the using the massive cross-correlation piking of arrivals and usage the optimization algorithm for simultaneous estimation the coordinates of the event and the effective velocity for each event.